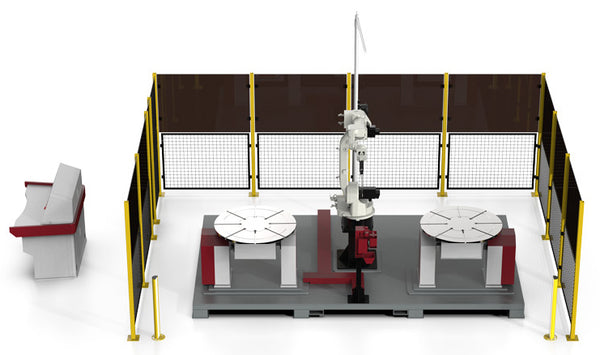
I.Descripción de la soldadura robótica:
1.Adecuado para varios componentes pequeños como patas de vaca, patas de la torre, placas de soporte de ronca y más.
2.Permite el posicionamiento flexible de la pieza de trabajo, permitiendo la soldadura y el manejo simultáneos para maximizar la eficiencia.
3.Bancos de trabajo o posicionadores de eje único/doble se pueden personalizar en función del tipo de pieza de trabajo y los requisitos de soldadura para cumplir con diferentes escenarios de soldadura.
4.El software se puede operar de manera infalible después de 1-2 días de capacitación, y no hay necesidad de intervención manual durante todo el proceso después de la carga, reduciendo en gran medida los requisitos de habilidad para los operadores.
segundo.Parámetros de soldadura robótica:
| Contenido | Rango de parámetros | Unidad | Observaciones |
| Grados de libertad (Ejes) | 6+2+2 | / | / |
| Temperatura ambiente requerida | -10 ~ 45 | ºC | / |
| Carga final máxima | 6 | kilogramo | / |
| Superficie útil recomendada | W1000*L1000*H600 | mm | / |
| Potencia total máxima | 45 | kilovatios | / |
| Voltaje/frecuencia de entrada nominal | 380+/-10% | V | Trifásico |
| Frecuencia de entrada nominal | 50 | Hz | / |
| Espacio en el piso | 2400*4000 | mm | / |
III. Ventajas de la soldadura robótica:
 | Sistema de control y accionamiento integrado del robot
4. Equipado con detección y monitoreo de colisión. |
Sistema gemelo digital
2. Operación a través de la interfaz de la computadora, con el objeto físico siguiendo los movimientos. 3. La trayectoria generada por la escena, el comando de un solo clic y la soldadura pueden comenzar. 4. Comunicación en tiempo real, integración de la ejecución de comandos virtuales y físicos. |  |
 | Sin enseñanza, sin programación
2. Comandos de proceso · Implementación rápida: las soldaduras de esquina, la soldadura intermitente, los comandos de múltiples capas y multipass se pueden seleccionar con un solo clic. 3. Guía de visión · Planificación de ruta automática: utilizando el escaneo láser de línea, el robot localiza rápidamente las posiciones de inicio y final de la costura de soldadura. |
Biblioteca de procesos de soldadura incorporada
2. Edición de costura de soldadura: seleccione Bordes de soldadura a costuras de soldadura por lotes, se rompa los orificios de soldadura y los bordes de soldadura continuamente. Elija procesos de soldadura de acuerdo con la costura de soldadura (soldadura de múltiples capas y múltiples paso hacia arriba). 3. Verificación de simulación: verifique si la trayectoria de ejecución es razonable, o si hay alguna interferencia. Asegúrese de que el ángulo de soldadura satisfaga el proceso de soldadura. |  |
 | Módulo de seguimiento y posicionamiento visual
(2). Refleja con precisión la posición y la postura de la pieza de trabajo, con la captura de imagen para dar como resultado el tiempo de salida de menos de un segundo. (3). El posicionamiento preciso evita colisiones durante el proceso de soldadura. (4). Operación de interfaz gráfica completa No se requiere experiencia de operación de robot anterior, completando fácilmente todo el flujo de trabajo. |
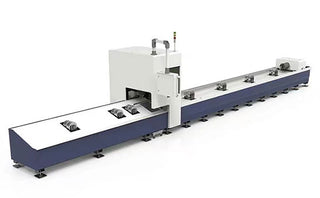
IV. Robot de soldadura Soldar Tipo

V.Muestras de soldadura robótica

Producto relacionado













¿Tienes alguna pregunta? ¡Contáctanos!
Contáctenos si está pensando en comprar ingredientes de alta calidad, desarrollar nuevos productos o simplemente resolver un desafío de fabricación en sus materias primas.





