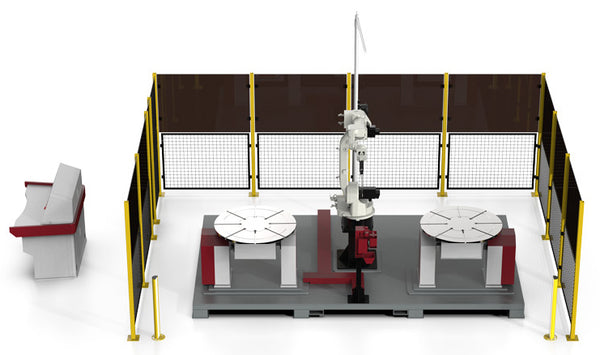
Я.Описание роботизированной сварки:
1.Подходит для различных небольших компонентов, таких как коровьи ножки, ножки башни, пластины для поддержки и многое другое.
2.Включает гибкое позиционирование заготовки, позволяя одновременно сварку и обработку, чтобы максимизировать эффективность.
3.Workbenches или одно/двойная осевая позиционеры могут быть настроены на основе типа заготовки и требований к сварке для соответствия различным сценариям сварки.
4.Программное обеспечение может работать с надежным образом после 1-2 дней обучения, и нет необходимости в ручном вмешательстве на протяжении всего процесса после загрузки, что значительно снижает требования к навыкам для операторов.
II.Параметры роботизированной сварки:
| Содержание | Диапазон параметров | Единица | Замечания |
| Степени свободы (оси) | 6+2+2 | / | / |
| Требуемая температура окружающей среды | -10~45 | ºС | / |
| Максимальная конечная нагрузка | 6 | Кг | / |
| Рекомендуемая площадь пола | W1000*Л1000*Х600 | мм | / |
| Пиковая общая мощность | 45 | кВт | / |
| Номинальное входное напряжение/частота | 380+/-10% | В | Трехфазный |
| Номинальная входная частота | 50 | Гц | / |
| Площадь пола | 2400*4000 | мм | / |
III. Преимущества роботизированной сварки:
 | Интегрированная система привода и управления роботом
4. Оснащен обнаружением и мониторингом столкновений. |
Цифровая система двойников
2. Работа через компьютерный интерфейс, с физическим объектом, следуя движению. 3. Можно начаться траектория, сгенерированная сценой, команда с одним щелчком и сварка. 4. Общение в реальном времени, интеграция виртуального и физического выполнения команды. |  |
 | Никакого обучения, никакого программирования
2. Команды процессов · Быстрое развертывание: угловые сварные швы, прерывистая сварка, многослойные и многопроходные команды могут быть выбраны с одним щелчком. 3. Руководство по видению · Автоматическое планирование пути: использование лазерного сканирования линейного робота быстро определяет начальные и конечные позиции сварочного шва. |
Встроенная библиотека процессов сварки
2. Редактирование сварного шва: выберите края сварного шва для сварных швов, разбивая отверстия для сварки и непрерывно сварные края. Выберите процессы сварки в соответствии с швами сварного шва (многослойный и многопроходной, вертикальный угловой шва). 3. Проверка моделирования: убедитесь, является ли работающая траектория разумной, или есть ли какие -либо помехи. Убедитесь, что угол сварки удовлетворяет процессу сварки. |  |
 | Модуль визуального позиционирования и отслеживания
(2). Точно отражает положение и позу заготовки, с захватом изображения, чтобы результат вывода составляет менее одной секунды. (3). Точное позиционирование предотвращает столкновения в процессе сварки. (4). Полный графический интерфейс. |
IV. Сварочный робот Сварка Тип

В.Образцы роботизированной сварки

Похожий продукт













Есть вопросы? Давайте свяжемся!
Свяжитесь с нами, если вы думаете о покупке высококачественных ингредиентов, разработке новых продуктов или просто решаете производственную проблему с сырьем.





